 |
Nori
23
|


|
|
Nori
23
|
|
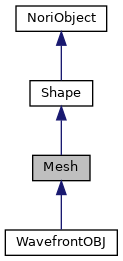
Triangle mesh. More...
#include <mesh.h>
Public Member Functions | |
| virtual void | activate () override |
| Initialize internal data structures (called once by the XML parser) | |
| virtual uint32_t | getPrimitiveCount () const override |
| Return the total number of triangles in this shape. | |
| virtual BoundingBox3f | getBoundingBox (uint32_t index) const override |
| virtual Point3f | getCentroid (uint32_t index) const override |
| virtual bool | rayIntersect (uint32_t index, const Ray3f &ray, float &u, float &v, float &t) const override |
| Ray-triangle intersection test. More... | |
| virtual void | setHitInformation (uint32_t index, const Ray3f &ray, Intersection &its) const override |
| Set intersection information: hit point, shading frame, UVs. | |
| uint32_t | getVertexCount () const |
| Return the total number of vertices in this shape. | |
| virtual void | sampleSurface (ShapeQueryRecord &sRec, const Point2f &sample) const override |
| Uniformly sample a position on the mesh with respect to surface area. | |
| virtual float | pdfSurface (const ShapeQueryRecord &sRec) const override |
| Return the probability of sampling a point sRec.p by the sampleSurface() method (sRec.ref should be set before) sRec.n and sRec.pdf are ignored. | |
| float | surfaceArea (uint32_t index) const |
| Return the surface area of the given triangle. | |
| Point3f | getInterpolatedVertex (uint32_t index, const Vector3f &bc) const |
| Normal3f | getInterpolatedNormal (uint32_t index, const Vector3f &bc) const |
| const MatrixXf & | getVertexPositions () const |
| Return a pointer to the vertex positions. | |
| const MatrixXf & | getVertexNormals () const |
Return a pointer to the vertex normals (or nullptr if there are none) | |
| const MatrixXf & | getVertexTexCoords () const |
Return a pointer to the texture coordinates (or nullptr if there are none) | |
| const MatrixXu & | getIndices () const |
| Return a pointer to the triangle vertex index list. | |
| const std::string & | getName () const |
| Return the name of this mesh. | |
| virtual std::string | toString () const override |
| Return a human-readable summary of this instance. | |
 Public Member Functions inherited from Shape Public Member Functions inherited from Shape | |
| virtual | ~Shape () |
| Release all memory. | |
| virtual void | addChild (NoriObject *child) override |
| Add a child object to the current instance. More... | |
| const BoundingBox3f & | getBoundingBox () const |
| bool | isEmitter () const |
| Is this mesh an area emitter? | |
| Emitter * | getEmitter () |
| Return a pointer to an attached area emitter instance. | |
| const Emitter * | getEmitter () const |
| Return a pointer to an attached area emitter instance (const version) | |
| const BSDF * | getBSDF () const |
| Return a pointer to the BSDF associated with this mesh. | |
| virtual EClassType | getClassType () const override |
| Return the type of object (i.e. Mesh/BSDF/etc.) provided by this instance. | |
| Public Member Functions inherited from NoriObject | |
| virtual | ~NoriObject () |
| Virtual destructor. | |
| virtual void | setParent (NoriObject *parent) |
| Set the parent object. More... | |
| void | setIdName (const std::string &name) |
| Allow to assign a name to the object. | |
| const std::string & | getIdName () const |
Protected Member Functions | |
| Mesh () | |
| Create an empty mesh. | |
Protected Attributes | |
| std::string | m_name |
| Identifying name. | |
| MatrixXf | m_V |
| Vertex positions. | |
| MatrixXf | m_N |
| Vertex normals. | |
| MatrixXf | m_UV |
| Vertex texture coordinates. | |
| MatrixXu | m_F |
| Faces. | |
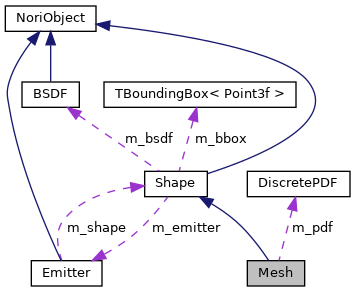
| DiscretePDF | m_pdf |
| Protected Attributes inherited from Shape | |
| BSDF * | m_bsdf = nullptr |
| BSDF of the surface. | |
| Emitter * | m_emitter = nullptr |
| Associated emitter, if any. | |
| BoundingBox3f | m_bbox |
| Bounding box of the mesh. | |
| Protected Attributes inherited from NoriObject | |
| std::string | m_idname |
Additional Inherited Members | |
| Public Types inherited from NoriObject | |
| enum | EClassType { EScene = 0 , EMesh , ETexture , EBSDF , EPhaseFunction , EEmitter , EMedium , ECamera , EIntegrator , ESampler , ETest , EReconstructionFilter , EClassTypeCount } |
| Static Public Member Functions inherited from NoriObject | |
| static std::string | classTypeName (EClassType type) |
| Turn a class type into a human-readable string. | |
Triangle mesh.
This class stores a triangle mesh object and provides numerous functions for querying the individual triangles. Subclasses of Mesh implement the specifics of how to create its contents (e.g. by loading from an external file)
|
overridevirtual |
Ray-triangle intersection test.
Uses the algorithm by Moeller and Trumbore discussed at http://www.acm.org/jgt/papers/MollerTrumbore97/code.html.
Note that the test only applies to a single triangle in the mesh. An acceleration data structure like BVH is needed to search for intersections against many triangles.
| index | Index of the triangle that should be intersected |
| ray | The ray segment to be used for the intersection query |
| t | Upon success, t contains the distance from the ray origin to the intersection point, |
| u | Upon success, u will contain the 'U' component of the intersection in barycentric coordinates |
| v | Upon success, v will contain the 'V' component of the intersection in barycentric coordinates |
true if an intersection has been detected Implements Shape.