Registration of Multiple RGBD Cameras via Local Rigid Transformations
T. Deng, J.C. Bazin, T. Martin, C. Kuster, J. Cai, T. Popa, M. GrossProceedings of IEEE ICME 2014 (Chengdu, China, July 14-18, 2014), pp.
Abstract
RGBD cameras, such as the Kinect, have recently revolutionized the field of real-time geometry and appearance acquisition. While impressive 3D reconstruction results have been obtained, combining data acquired by multiple RGBD cameras constitutes a technical challenge. Several methods have been proposed to estimate the internal parameters of each RGBD camera (such as depth mapping function and focal length). Despite that the textured geometry obtained by each RGBD camera individually is visually attractive, even state-of-the-art methods have difficulties in correctly combining the textured geometries obtained by several RGBD cameras via a rigid transformation. Based on this observation, our approach registers the RGBD cameras by a smooth field of rigid transformations, instead of a single rigid transformation. Experimental results on challenging data demonstrate the validity of the proposed approach.Overview
Registration of multi RGBD camera setups is a notoriously sensitive and delicate procedure despite the variety of available methods. In particular, the registration between RGBD cameras which typically consists of a (single) rigid transformation often fails in practice to faithfully align all the depth and color streams consistently everywhere inside the capture volume, as observed in many experiments. We address this issue by proposing a practical and general approach to register the depth and color streams of multi RGBD camera setups. Our approach estimates a smooth field of rigid transformations between several RGBD cameras. In terms of both visual quality and measurable reprojection errors, we demonstrate that our method provides better results than state-of-the-art methods.
Results
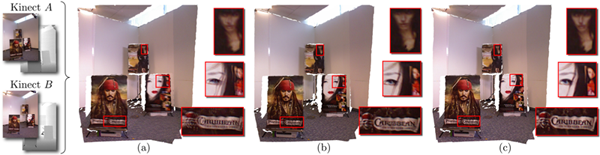
Registration of two textured geometries acquired from two RGBD
cameras (Kinects) by a single 3D rigid transformation (e.g.,
obtained by the popular ICP algorithm) with (a) the
internal parameters of the RGBD cameras provided by the
manufacturer, and with (b) the internal parameters computed by
Herrera's calibration toolbox. (c) The proposed 3D
registration field with the internal parameters provided by
the manufacturer. This comparison shows that, in contrast to
single 3D rigid transformation- based methods, our proposed
approach provides a visually appealing alignment even when
using low accuracy internal (e.g., manufacturer's) parameters.


