Simulation and Animation
Introduction
Computer-animated objects are ubiquitous in entertainment and training applications of computer graphics (e.g. videogames, feature films, surgical simulators, etc.). As opposed to tedious and rather inflexible key-frame animation, physics-based simulation offers a concise, but rich and flexible way of defining the behavior of animated objects, by allowing the laws of physics to determine or guide their motion. In contrast to the mathematical modeling of physical objects in computational physics, our primary concerns are artistic controllability, robustness and efficiency. You can find more information on the simulation and animation group website.
Topics
Deep learning based physics simulations
We develop methods at the intersection of deep learning and physics simulations to solve some of the persistent problems in graphics. This includes our work on reduced order modeling and latent space integration, neural flow field recovery, and video-based reconstruction of flow fields.

Art-directable simulations with AI
In visual effects it is a key requirement to have art-directable numerical simulations and hence full control over the shape and motion of a body. We develop deep learning based methods to transfer styles from arbitrary input images to 3D smoke simulations, to compute smoke volumes and animations based on sketch inputs, and to control the motion of a fluid using keyframe inputs.

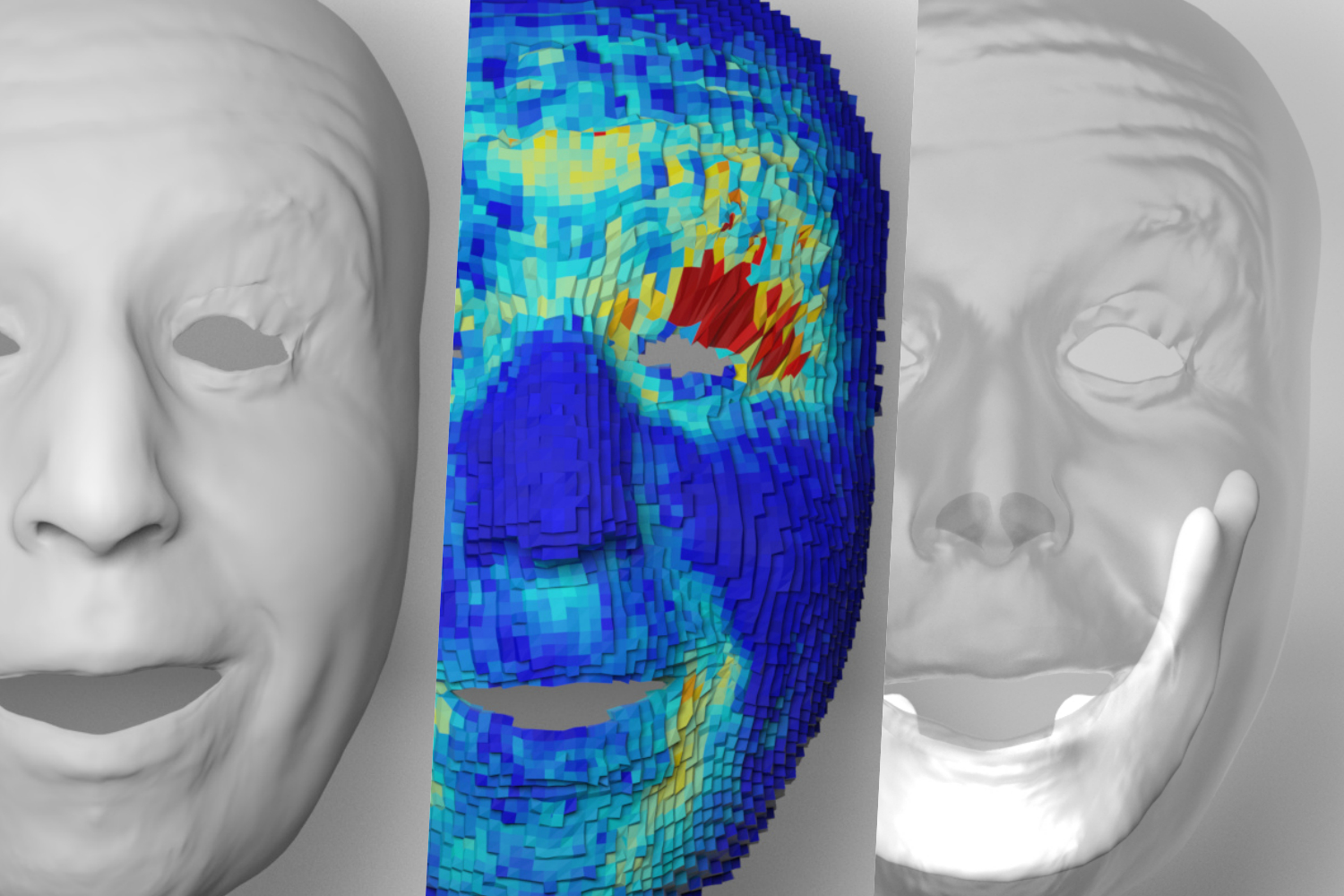
Physics-based digital humans
In the context of digital humans we develop techniques to model and animate faces using data and physics priors, applied to both visual effects and medical applications. This includes our work on reconstructing and simulating 3D faces for medical treatment planning, and on controlling physics-based facial animation.
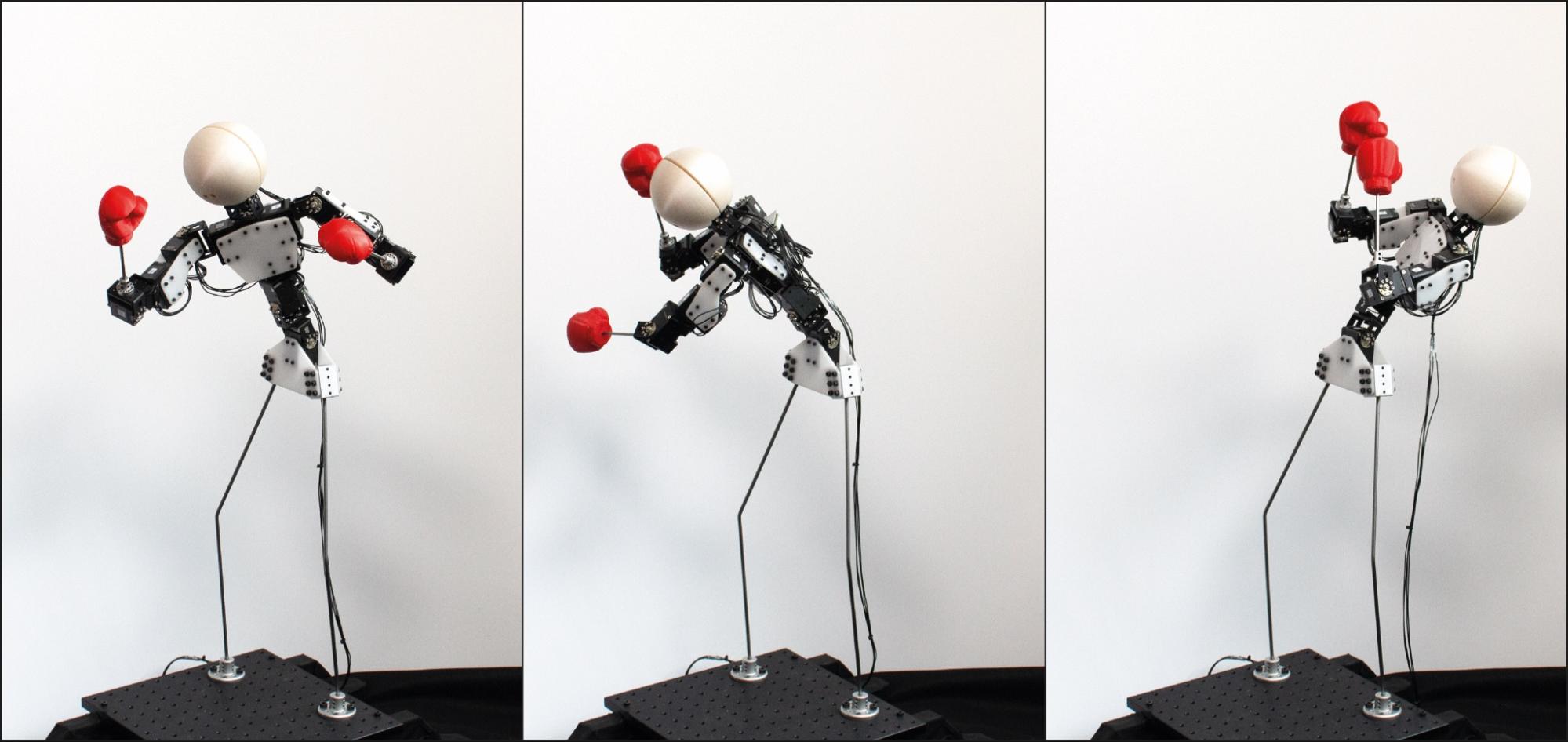
Neural Augmentation of Simulation Representations of Robotic Systems
Digital twins that represent robotic systems with minimal sim-to-real gaps enable improved control and design. Within the scope of this effort, we augment simulation representations with neural networks to close sim-to-real gaps when modeling building blocks robotic systems are made of. Applications include surgical devices that require high-precision modeling, legged systems where accurate contact estimation is needed, and entertainment robots that can perform expressive animations.
Publications
2025
NeuRiPhy: Neural Baking of Physics-Based Deformations for Facial Rigs
Proceedings of the 2025 ACM SIGGRAPH/Eurographics Symposium on Computer Animation (Vancouver, Canada, August 7-10, 2025), pp. 272-289
Available files: [PDF] [Video] [BibTeX] [Abstract]
Spline-based Transformers
Proceedings of Computer Vision - (ECCV) - 18th European Conference, Part LXXXVI (Milano, Italy, September 29-October 04, 2024), pp. 1-17
Available files: [PDF][PDF suppl.] [BibTeX] [Abstract] [YouTube]

VMP: Versatile Motion Priors for Robustly Tracking Motion on Physical Characters
Proceedings of the 2024 ACM SIGGRAPH/Eurographics Symposium on Computer Animation (Montreal, Canada, Aug 21-23, 2024), pp. 1-11 (Best Paper Presentation)
Available files: [PDF] [BibTeX] [Abstract] [YouTube]
Learning a Generalized Physical Face Model From Data
Proceedings of ACM SIGGRAPH (Denver, US, July 28-August 01, 2024), ACM Transactions on Graphics, vol. 43, no. 94, pp. 1-14
Available files: [PDF] [Video] [BibTeX] [Abstract]
The Impulse Particle-In-Cell Method
Proceedings of Eurographics (Limassol, Cyprus, April 22-26, 2024), Computer Graphics Forum, vol. 43, no. 2, pp. 1-13 (Best Paper Honorable Mention)
Available files: [PDF][PDF suppl.] [BibTeX] [Abstract] [YouTube]
2023
An Implicit Physical Face Model Driven by Expression and Style
Proceedings of SA '23: SIGGRAPH Asia 2023 (Sydney, Australia, December 12-15, 2023), pp. 106:1-106:12
Available files: [PDF][PDF suppl.] [Video] [BibTeX] [Abstract]
Physics-Informed Neural Corrector for Deformation-based Fluid Control
Proceedings of Eurographics (Saarbrücken, Germany, May 08-12, 2023), Computer Graphics Forum, vol. 42, no. 2, pp. 161-173
Available files: [PDF] [BibTeX] [Abstract]
Learning to Estimate Single-view Volumetric Flow Motions without 3D Supervision
International Conference on Learning Representations (ICLR), Kigali, Rwanda, May 01-05, 2023
Available files: [PDF] [BibTeX] [Abstract]
2022
Neural Green's function for Laplacian systems
Computers & Graphics 107 (2022): pp. 186-196.
Available files: [PDF][PDF suppl.] [BibTeX] [Abstract]
Differentiable Simulation for Outcome-Driven Orthognathic Surgery Planning
Proceedings of the 2022 ACM SIGGRAPH/Eurographics Symposium on Computer Animation (Durham, UK, September 13-15, 2022), pp. 53-61
Available files: [PDF] [BibTeX] [Abstract]
Implicit Neural Representation for Physics-driven Actuated Soft Bodies
Proceedings of ACM SIGGRAPH (Vancouver, Canada, August 8-11, 2022), ACM Transactions on Graphics, vol. 41, no. 4, pp. 122:1-122:10 (Honorable Mention)
Available files: [PDF][PDF suppl.] [Video] [BibTeX] [Abstract]
Deep Reconstruction of 3D Smoke Densities from Artist Sketches
Proceedings of Eurographics (Reims, France, April 25-29, 2022), Computer Graphics Forum, vol. 41, no. 2, pp. 97-110
Available files: [PDF][PDF suppl.] [Video] [BibTeX] [Abstract] [YouTube]
2021
Deep Learning Speeds Up Ice Flow Modelling by Several Orders of Magnitude
Journal of Glaciology, Cambridge University Press, vol. , no. , 2021, pp. 1-14
Available files: [PDF] [BibTeX] [Abstract]
Modeling Electromagnetic Navigation Systems
IEEE Transactions on Robotics, IEEE, vol. 37, no. 4, 2021, pp. 1009-1021
Available files: [PDF] [BibTeX] [Abstract]
Honey I Shrunk the Domain: Reduced Domain Decomposition for Efficient Optimization of Fluids
Proceedings of Eurographics (Vienna, Austria, May 3-7, 2021), Computer Graphics Forum, vol. 40, no. 2, pp. 339-353 (Best Paper Award)
Available files: [PDF][PDF suppl.] [Video] [BibTeX] [Abstract]
A Physics-Aware Neural Network Approach for Flow Data Reconstruction From Satellite Observations
Frontiers in Climate, Frontiers, vol. 3, no. , 2021, pp. 23
Available files: [PDF] [BibTeX] [Abstract]
2020
Latent Space Subdivision:Stable and Controllable Time Predictions for Fluid Flow
Proceedings of the 2020 ACM SIGGRAPH/Eurographics Symposium on Computer Animation (Online, Oct 6-9, 2020), pp. 15-25
Available files: [PDF] [Video] [BibTeX] [Abstract] [YouTube]
An Extended Cut-cell method for Sub-Grid Liquids Tracking with Surface Tension
Proceedings of ACM SIGGRAPH Asia (Daegu, Korea, November 17-20, 2020), ACM Transactions on Graphics, vol. 39, no. 6, pp. 188:1-199:11
Available files: [PDF] [Abstract] [YouTube]
Frequency-Aware Reconstruction of Fluid Simulations with Generative Networks
Eurographics - Short Papers (Norrköping, Sweden, May 25-29, 2020), pp. 65-68
Available files: [PDF] [BibTeX] [Abstract]
2019
Transport-Based Neural Style Transfer for Smoke Simulations
Proceedings of ACM SIGGRAPH Asia (Brisbane, Australia, November 17-20, 2019), ACM Transactions on Graphics, vol. 38, no. 6, pp. 188:1-188:11
Available files: [PDF][PDF suppl.] [Video] [BibTeX] [Abstract] [YouTube] [Link]
Smoothed Particle Hydrodynamics Techniques for the Physics Based Simulation of Fluids and Solids
Eurographics Tutorial, Genoa, Italy, May 6-10 2019.
Available files: [PDF]
Deep Fluids: A Generative Network for Parameterized Fluid Simulations
Proceedings of Eurographics (Genova, Italy, May 6-10, 2019), Computer Graphics Forum, vol. 38, no. 2, pp. 59-70
Available files: [PDF][PDF suppl.] [BibTeX] [Abstract] [YouTube]
2018
Keys-to-Sim: Transferring Hand-Crafted Key-framed Animations to Simulated Figures using Wide Band Stochastic Trajectory Optimization
Computer Graphics and Visual Computing 2018, The Eurographics Association (Swansea, Wales, September 13-14, 2018), pp. 33-41
Available files: [PDF][PDF suppl.] [Video] [Video] [BibTeX] [Abstract]
2015
Data-driven Fluid Simulations using Regression Forests
Proceedings of ACM SIGGRAPH Asia (Kobe, Japan, 2-5 November, 2015), ACM Transactions on Graphics, vol. 34, no. 6, pp. 199:1--199:9
Available files: [PDF] [Video] [BibTeX] [Abstract]
SPH Fluids in Computer Graphics
Proceedings of Eurographics (Strasbourg, France, April, 2014), Computer Graphics Forum, vol. , no. , pp. 21-42
Available files: [PDF] [BibTeX] [Abstract]
Subspace Clothing Simulation Using Adaptive Bases
Proceedings of ACM SIGGRAPH (Vancouver, Canada, August 10-14, 2014), ACM Transactions on Graphics, vol. 34, no. 4, pp. 105:1--105:9
Available files: [PDF] [Video] [BibTeX] [Abstract]
Implicit Incompressible SPH
IEEE Transactions on Visualization and Computer Graphics, vol. , no. , 2013, pp.
Available files: [PDF] [Video] [Abstract]
2012
Efficient Simulation of Example-based Materials
Proceedings of the 2012 ACM SIGGRAPH/Eurographics Symposium on Computer Animation (Lausanne, Switzerland, July 29-31, 2012), pp. 1-8
Available files: [PDF] [Video] [Abstract]
Versatile Rigid-Fluid Coupling for Incompressible SPH
Proceedings of ACM SIGGRAPH (Los Angeles, USA, August 5-9, 2012), ACM Transactions on Graphics, vol. 31, no. 4, pp. 62:1-62:8
Available files: [PDF] [Video] [BibTeX]
2010
Scalable Fluid Simulation using Anisotropic Turbulence Particles
Proceedings of ACM SIGGRAPH Asia (Seoul, Korea, December 15-18, 2010), ACM Transactions on Graphics, vol. 29, no. 5, pp. 174:1-174:8
Available files: [PDF] [Video] [BibTeX] [Abstract]
Flexible Simulation of Deformable Models Using Discontinuous Galerkin FEM
Journal of Graphical Models, vol. 71, no. 4, 2009, Special Issue of ACM SIGGRAPH / Eurographics Symposium on Computer Animation 2008, pp. 153-167
Available files: [PDF] [Video] [Video] [Abstract]
Polyhedral Finite Elements Using Harmonic Basis Functions
Proceedings of Eurographics Symposium on Geometry Processing (Copenhagen, Denmark, July 2-4, 2008), Computer Graphics Forum, vol. 27, no. 5, 2008, pp. 1521-1529 (Best Student Paper Award)
Available files: [PDF] [Video] [Abstract]